|
Microflow 3D
v1.0
|
|
Microflow 3D
v1.0
|
#include "Collision.h"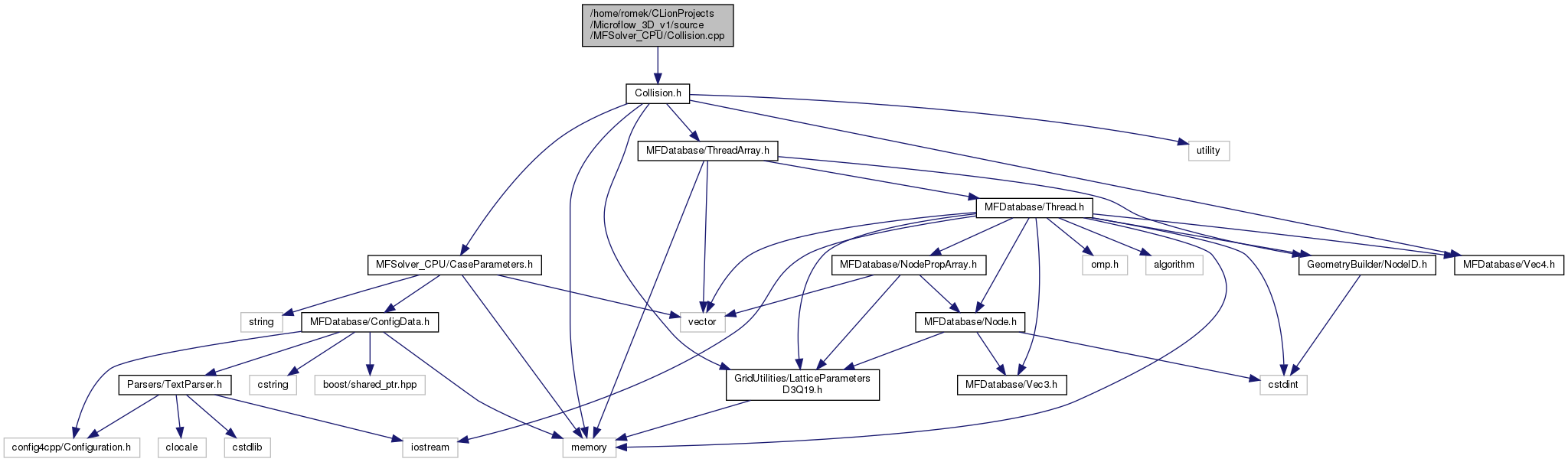
Go to the source code of this file.
Macros | |
| #define | f(x) (pNode->FQ19[x]) |
| #define | U (Vector4.x) |
| #define | V (Vector4.y) |
| #define | W (Vector4.z) |
| #define | RHO (Vector4.rho) |
| #define | DirectionVectorComponent_Cx(x) (m_LatticeParameters_Ptr->DirectionVectorComponent_Cx[x]) |
| #define | DirectionVectorComponent_Cy(x) (m_LatticeParameters_Ptr->DirectionVectorComponent_Cy[x]) |
| #define | DirectionVectorComponent_Cz(x) (m_LatticeParameters_Ptr->DirectionVectorComponent_Cz[x]) |
| #define | DirectionWeight_W(x) (m_LatticeParameters_Ptr->DirectionWeight_W[x]) |
| #define DirectionVectorComponent_Cx | ( | x | ) | (m_LatticeParameters_Ptr->DirectionVectorComponent_Cx[x]) |
Definition at line 18 of file Collision.cpp.
Referenced by MF::Solver_CPU::Collision::SetCollisionPointerToFunc(), and MF::Solver_CPU::FluidFunctions::SetFluidSolidNodePointerToFunc().
| #define DirectionVectorComponent_Cy | ( | x | ) | (m_LatticeParameters_Ptr->DirectionVectorComponent_Cy[x]) |
Definition at line 19 of file Collision.cpp.
Referenced by MF::Solver_CPU::Collision::SetCollisionPointerToFunc(), and MF::Solver_CPU::FluidFunctions::SetFluidSolidNodePointerToFunc().
| #define DirectionVectorComponent_Cz | ( | x | ) | (m_LatticeParameters_Ptr->DirectionVectorComponent_Cz[x]) |
Definition at line 20 of file Collision.cpp.
Referenced by MF::Solver_CPU::Collision::SetCollisionPointerToFunc(), and MF::Solver_CPU::FluidFunctions::SetFluidSolidNodePointerToFunc().
| #define DirectionWeight_W | ( | x | ) | (m_LatticeParameters_Ptr->DirectionWeight_W[x]) |
Definition at line 21 of file Collision.cpp.
Referenced by MF::Solver_CPU::Collision::SetCollisionPointerToFunc().
| #define f | ( | x | ) | (pNode->FQ19[x]) |
Definition at line 13 of file Collision.cpp.
Referenced by MF::Solver_CPU::Collision::SetCollisionPointerToFunc().
| #define RHO (Vector4.rho) |
Definition at line 17 of file Collision.cpp.
Referenced by MF::Solver_CPU::Collision::SetCollisionPointerToFunc().
| #define U (Vector4.x) |
Definition at line 14 of file Collision.cpp.
Referenced by MF::Solver_CPU::Collision::SetCollisionPointerToFunc().
| #define V (Vector4.y) |
Definition at line 15 of file Collision.cpp.
Referenced by MF::Solver_CPU::Collision::SetCollisionPointerToFunc().
| #define W (Vector4.z) |
Definition at line 16 of file Collision.cpp.
Referenced by MF::Solver_CPU::Collision::SetCollisionPointerToFunc().
 1.8.13
1.8.13